


DERO I+II
Beschreibung
Depalettiert auf engstem Raum: Unser kompakter Depalettierroboter I.
Der Depalettierroboter I setzt in der robotergesteuerten Depalettierung neue Maßstäbe in puncto Funktionalität und Effizienz. Bei der Entwicklung des kompakt gebauten Robotersystems nahm die Verwendung wartungsarmer Bauteile einen großen Stellenwert ein.
Depalettiert auf engstem Raum:
Die drei Achsen des Roboters werden von wartungsfreien Servomotoren angetrieben. Dank der robusten Konstruktion und der Nutzung einfacher Kinematik sinken die Betriebskosten auf ein Minimum.
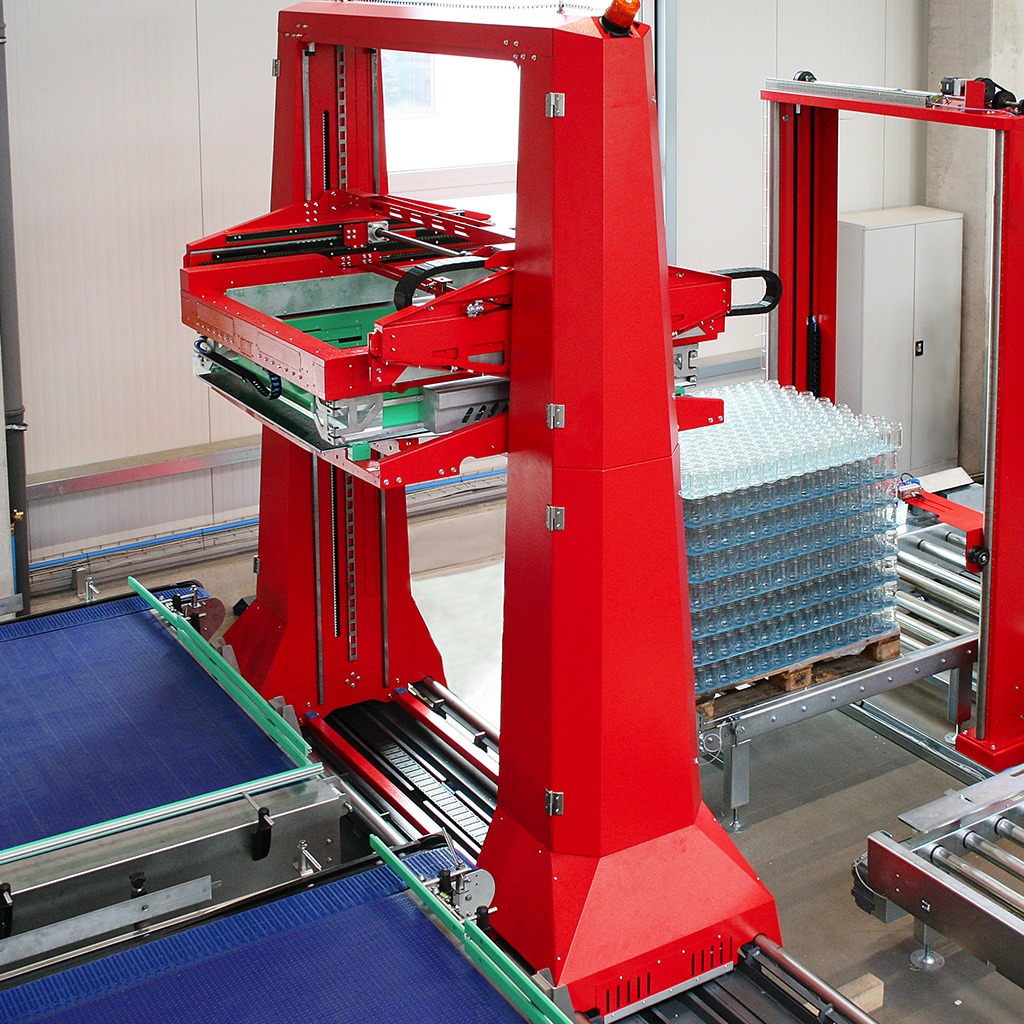
Zuverlässiger Lagengreifer:
Zur Aufnahme ganzer Lagen ist ein zuverlässiges Greifsystem unverzichtbar. Der konstruierte und gefertigte Lagengreifer umschließt die oberste Packstücklage und zieht sie auf das hinter der Palette positionierte Lagenblech. Die komplette Lage wird am Ablauftisch zurückgeschoben. Die noch auf den Packstücken liegende Zwischenlage wird währenddessen abgehoben und separat abgelegt.
Immer auf Achse:
Der Depalettierroboter II für die Depalettierung beliebig vieler Palettenplätze.
Konzipiert für das lagenweise Abräumen von Packstücken wie Gläser, Dosen oder Flaschen in der Pharma- und Lebensmittelindustrie zeichnet sich der Depalettierroboter II durch seine Flexibilität und Zuverlässigkeit aus. Er lässt sich für unterschiedliche Packstückdurchmesser nutzen und kann mehrere Palettenplätze bedienen. Dabei arbeitet der Depalettierroboter II mit einem Greifer, der zunächst die obere Packstücklage umschließt und durch Klemmbacken zentriert. Die gesamte Lage wird auf ein integriertes Überschubblech gezogen. Am Ablauftisch wird die Lage zurückgeschoben. Vorhandene Zwischenlagen nimmt der Roboter durch ein Saugsystem auf und legt sie in einem separaten Magazin ab.
Hohe Leistung durch das 3-Achs-Robotersystem
Die drei Bewegungsachsen ermöglichen eine hohe Leistung und ein effizientes Design des Robotersystems. Der zentrale Aufnahmetisch nimmt eine ganze Glaslage von der Palette auf. Der Tisch schiebt die Lage in einem Arbeitsgang auf den Ablauftisch, der die Gläser vereinzelt und der Produktionsstraße übergibt.
Da der Depalettierroboter DERO II mit Klemmbacken arbeitet, können zahlreiche Packstückgrößen ohne mechanische Einrichtung verarbeitet werden.
Pro Depalettierzyklus werden auch die Zwischenlagen von der Glaslage aufgenommen und in einem Magazin gesammelt.
Handling weiterer Produktionslinien
Die Verfahrbarkeit der Roboterkonstruktion auf der x-Achse ermöglicht das Handling verschiedener Produktionslinien. Während ein Ablauftisch noch mit Gläsern gefüllt ist und Zeile um Zeile entleert wird, nimmt DERO II bereits eine weitere Lage auf und bedient einen zweiten Ablauftisch. Bei mehreren Linien kann auch eine weitere Glassorte im Wechsel depalettiert werden, da keine Formatverstellung des Greifers notwendig ist.




